
Brain Machine Interface in space manned missions: amplifying FOCUSed attention for error Counterbalancing- BMI FOCUS

L’idea alla base del progetto e lo sviluppo di un sistema di misura e di potenziamento delle abilita cognitive, delle funzioni sensorimotorie, delle funzioni emotive e del controllo dello stress nell’uomo in condizioni estreme. Questa esigenza si rivela particolarmente importante per quei soggetti che operano in condizioni e contesti dove non e possibile permettersi errori nelle attività operative, come gli astronauti durante le attività di pilotaggio di veicoli spaziali.
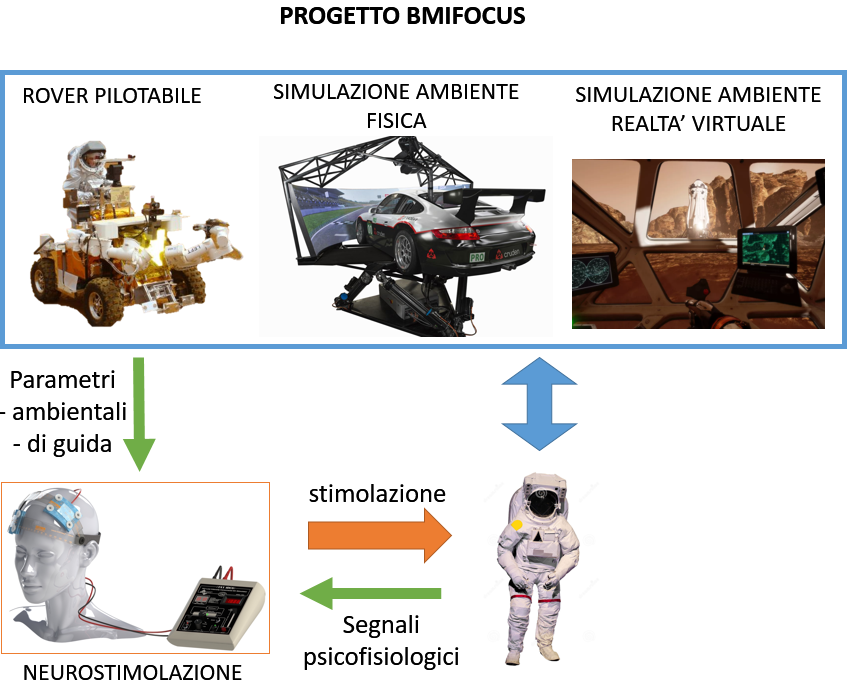
L’obiettivo generale del progetto sarà lo sviluppo di un sistema di neuro-stimolazione integrato in una piattaforma di addestramento per il pilotaggio di veicoli spaziali, sia in condizioni di simulazione sia in condizioni reali. Il sistema di neurostimolazione sara adattivo, ossia gestito mediante un’analisi in tempo reale dei segnali psico-fisiologici (ad es. elettroencefalografia, elettromiografia, elettrocardiografia, respirogramma, risposta galvanica cutanea), dei parametrici biomeccanici del soggetto, dei parametri ambientali, di simulazione e di guida al fine di incrementare ed ottimizzare le funzioni cerebrali cruciali per il raggiungimento dei compiti preposti di pilotaggio di veicoli spaziali.
La piattaforma di addestramento sarà in grado di riprodurre alcune operazioni, principalmente di integrazione sensorimotoria, critiche per le attività spaziali, tra cui:
- le operazioni di guida dei veicoli di esplorazione spaziale quali i Rover pilotabili;
- le operazioni di docking tra i veicoli spaziali.
Queste attività necessitano di condizioni psicofisiologiche ottimali e rappresentano fasi particolarmente delicate nei viaggi interplanetari, in cui la vita stessa degli astronauti e messa a forte rischio, e la cui riuscita e cruciale per il successo dell’intera missione spaziale. Inoltre, e importante essere anche in grado di addestrare gli astronauti ad alcune condizioni fisiche ambientali presenti nello spazio e non facilmente simulabili sulla terra, quali principalmente la riduzione della gravita.
Per effettuare le operazioni di addestramento in ambiente reale, sarà realizzato un modulo Rover pilotabile integrato con il sistema di neurostimolazione. Per l’addestramento simulato sarà realizzato un sistema di realtà virtuale ed un sistema aptico indossabile indossabile dal soggetto. Tale sistema sara costituito da un dispositivo robotico indossabile sugli arti superiori (braccia e mani) capace di registrare il movimento di chi lo indossa e in grado anche di esercitare delle forze sul soggetto stesso.
Tramite l’attuazione biomeccanica sarà possibile rendere pienamente reale l’esperienza di simulazione (ad es. simulando in modo efficace gli effetti a livello muscolare e scheletrico della riduzione/assenza di gravità). Il sistema aptico indossabile sarà combinato con un sistema di realta virtuale (VR) immersiva in un sistema integrato di simulazione (SIS). Il SIS sarà in grado di variare le situazioni di simulazione in diversi scenari con anche con diversi livelli di difficolta, ad esempio introducendo imprevisti o problematiche, in modo da sottoporre il soggetto ad un carico di stress acuto variabile.
Coordinatore: COSTRUZIONI NOVICROM S.R.L.
Partner:
- SIGMA INGEGNERIA
- GIGA PIÙ S.R.L.
- EUROPEAN AIR CRANE
- S.M. SCIENZIA MACHINALE S.R.L.
- HUMANWARE
- DREAMSLAB 3D
- Università di Pisa- Dipartimento di Patologia Chirurgica, Medica, Molecolare e dell'Area Critica
Contatti:
Prof. Benedetto Allotta
Prof. Federico Carpi
Prof. Andrea Corvi
Prof. Andrea Rindi
Ing. Enrico Meli
Ing. Alessandro Ridolfi
Scarica il poster del progetto
|
Progetto co-finanziato dal POR FESR Toscana 2014-2020 Asse Prioritario 1 Azione 1.1.5 |
|
Ultimo aggiornamento
15.04.2021